โครงงาน หุ่นยนต์เดินตามเส้น ESP8266 NodeMCU V2

โปรเจค นี้จะเป็นการนำ ESP8266 NodeMCU V2 ESP-12E มาทำเป็น หุ่นยนต์เดินตามเส้น
NodeMCU V2 เป็นบอร์ดที่ใช้ ESP8266 เป็น CPU สำหรับประมวลผลโปรแกรมต่างๆ มีข้อดีกว่า Arduino ตรงที่ตัวมันมีขนาดเล็กกว่า มีพื้นที่เขียนโปรแกรมลงไปมากกว่า และสามารถเชื่อมต่อกับ WiFi ได้
อุปกรณ์ที่ใช้
1. 2WD Smart Car Robot Chassis Kits
2. NodeMCU V2 CP2102 Lua WIFI ESP8266 ESP-12E
3. Micro USB Cable Wire 1m for NodeMCU
4. Breadboard 8.5CM x 5.5CM
5. Motor Driver Module HG7881
6. Jumper (M2M) 20cm
7. Jumper (F2M) 20cm
8. IR Infrared Obstacle Avoidance Sensor
9. Mounting Bracket for HC-SR04 แบบสั้น
10. แผ่นอะคริลิค
11. สกรูหัวกลม+น็อตตัวเมีย 12มม
.
การจะใช้ NodeMCU ได้นั้น จำเป็นต้องติดตั้ง แพลตฟอร์ม ESP8266 เพื่อ ทำการติดต่อ ระหว่าง Arduino IDE กับ NodeMCU

โปรเจค นี้จะเป็นการนำ ESP8266 NodeMCU V2 ESP-12E มาทำเป็น หุ่นยนต์เดินตามเส้น
NodeMCU V2 เป็นบอร์ดที่ใช้ ESP8266 เป็น CPU สำหรับประมวลผลโปรแกรมต่างๆ มีข้อดีกว่า Arduino ตรงที่ตัวมันมีขนาดเล็กกว่า มีพื้นที่เขียนโปรแกรมลงไปมากกว่า และสามารถเชื่อมต่อกับ WiFi ได้
อุปกรณ์ที่ใช้
1. 2WD Smart Car Robot Chassis Kits
2. NodeMCU V2 CP2102 Lua WIFI ESP8266 ESP-12E
3. Micro USB Cable Wire 1m for NodeMCU
4. Breadboard 8.5CM x 5.5CM
5. Motor Driver Module HG7881
6. Jumper (M2M) 20cm
7. Jumper (F2M) 20cm
8. IR Infrared Obstacle Avoidance Sensor
9. Mounting Bracket for HC-SR04 แบบสั้น
10. แผ่นอะคริลิค
11. สกรูหัวกลม+น็อตตัวเมีย 12มม
.
การจะใช้ NodeMCU ได้นั้น จำเป็นต้องติดตั้ง แพลตฟอร์ม ESP8266 เพื่อ ทำการติดต่อ ระหว่าง Arduino IDE กับ NodeMCU
ลิงค์ : ขั้นตอนการติดตั้ง แพลตฟอร์ม ESP8266
ลิงค์ : การใช้งาน NodeMCU V2 ESP8266 ESP-12E
ประกอบหุ่นยนต์
ต่อวงจรตามรูป

เริ่มต้นด้วยการ ประกอบ 2WD Smart Car Robot Chassis Kits

ยึด รางถ่าน ขนาด AA 4 ก้อน และ ต่อสายสีแดงจากรางถ่านเข้า สวิทช์

ประกอบ NodeMCU V2 เข้ากับ Breadboard 8.5CM x 5.5CM ติดลงที่ Smart Car


ต่อสาย จาก สวิทช์อีกด้าน ไปยัง ไฟ+ ของ Breadboard และ สายสีดำจากรางถ่าน ไปยัง ไฟ- ของ Breadboard

ยึด Motor Driver

ต่อสาย จาก Motor Driver ทั้ง 2 ด้าน ไปยัง มอเตอร์ ทั้ง 2 ตัว

การต่อสาย มอเตอร์ด้านล่าง ทั้ง 2 ตัว

ต่อสาย จาก Motor Driver ไปยัง NodeMCU V2
Driver <-> NodeMCU
B-IA <-> D2
B-IB <-> D1
GND <-> G
VCC <-> VIN
A-IA <-> D3
A-IB <-> D4

ต่อสาย จาก ไฟ+ ของ Breadboard ไปยัง ขา VIN ของ NodeMCU V2 และ ต่อสาย จาก ไฟ- ของ Breadboard ไปยัง ขา G ของ NodeMCU V2

ภาพรวม หุ่นยนต์สำหรับทดสอบ การเคลื่อนที่ของหุ่นยนต์
ต่อวงจรตามรูป

เริ่มต้นด้วยการ ประกอบ 2WD Smart Car Robot Chassis Kits

ยึด รางถ่าน ขนาด AA 4 ก้อน และ ต่อสายสีแดงจากรางถ่านเข้า สวิทช์

ประกอบ NodeMCU V2 เข้ากับ Breadboard 8.5CM x 5.5CM ติดลงที่ Smart Car


ต่อสาย จาก สวิทช์อีกด้าน ไปยัง ไฟ+ ของ Breadboard และ สายสีดำจากรางถ่าน ไปยัง ไฟ- ของ Breadboard

ยึด Motor Driver

ต่อสาย จาก Motor Driver ทั้ง 2 ด้าน ไปยัง มอเตอร์ ทั้ง 2 ตัว

การต่อสาย มอเตอร์ด้านล่าง ทั้ง 2 ตัว

ต่อสาย จาก Motor Driver ไปยัง NodeMCU V2
Driver <-> NodeMCU
B-IA <-> D2
B-IB <-> D1
GND <-> G
B-IA <-> D2
B-IB <-> D1
GND <-> G
VCC <-> VIN
A-IA <-> D3
A-IA <-> D3
A-IB <-> D4

ต่อสาย จาก ไฟ+ ของ Breadboard ไปยัง ขา VIN ของ NodeMCU V2 และ ต่อสาย จาก ไฟ- ของ Breadboard ไปยัง ขา G ของ NodeMCU V2

ภาพรวม หุ่นยนต์สำหรับทดสอบ การเคลื่อนที่ของหุ่นยนต์
การใช้งาน Digital/Input ซึ่งการใช้งาน Digital I/O ของ ESP8266 นั้น สามารถใช้งานคำสั่ง digitalWrite, digitalRead ได้เช่นเดียวกับการใช้งาน Digital I/O ของ Arduino โดยกำหนดหมายเลขของ Pin เช่นตัวอย่าง Pin ที่ 5 หรือจะกำหนดชื่อ Pin โดยอ้างตามชื่อ Pin บนบอร์ด NodeMCU V2 เป็น D1 ก็ได้เช่นกัน

1.ตรวจสอบการติดตั้งไดร์เวอร์ ของ NodeMCU V2


2. ทดสอบ การเคลื่อนที่ของหุ่นยนต์


เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด NodeMCU V2
// Motor A pins
int pinA2 = D1;
int pinA1 = D2;
//Motor B pins
int pinB2 = D3;
int pinB1 = D4;
//This lets you run the loop a single time for testing
boolean run = true;
void setup() {
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop() {
if (run) {
for (int i = 0; i <= 500; i++) {
delay(10);
}
//Go forward
forward(400);
coast(200);
//Go backward
backward(400);
coast(200);
//Turn left
turnLeft(400);
coast(200);
//Turn right
turnRight(400);
coast(200);
//This stops the loop
run = false;
}
}
//Define high-level H-bridge commands
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
เลือก Port ในตัวอย่างเป็น "COM12"

เลือก Board : NodeMCU 1.0 (ESP-12E Module)

Upload
ถ้ามีปัญหา Upload ไม่เข้า ขึ้น Error แสดงข้อความว่า ตามรูปภาพ
warning: espcomm_sync failed
error: espcomm_open failed
error: espcomm_upload_mem failed

ให้กดปุ่ม RST 1 ครั้ง และ กดปุ่ม FLASH บนบอร์ด ของ NodeMCU ค้างไว้ ในขณะที่ทำการอัพโหลดโปรแกรม

รอจนกระทั่ง Done uploading. 100%
ใส่ แบตเตอรี่ ขนาด AA จำนวน 4 ก้อน ไปที่ รางถ่าน และ ตรวจสอบขั้วของแบตเตอรี่ ใส่ถุกต้องหรือไม่

ถ้าทุกอย่างถูกต้อง ทดลอง ยกลงวางที่พื้นแล้ว ทดสอบ ปิดเปิด สวิทช์ไฟ Power ถ้าทุกอย่างถูกต้อง ปรกติ รถจะเคลื่อนที่ไปข้างหน้า-ถอยหลัง แล้ว เลี้ยวซ้าย แล้ว เลี้ยวขวา
(ให้ล้อลากสีขาวเป็นท้ายของหุ่นยนต์ , ถ้าต้องการทดสอบใหม่ ให้ ปิดเปิด สวิทช์ไฟใหม่)


เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด NodeMCU V2
// Motor A pins
int pinA2 = D1;
int pinA1 = D2;
//Motor B pins
int pinB2 = D3;
int pinB1 = D4;
//This lets you run the loop a single time for testing
boolean run = true;
void setup() {
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop() {
if (run) {
for (int i = 0; i <= 500; i++) {
delay(10);
}
//Go forward
forward(400);
coast(200);
//Go backward
backward(400);
coast(200);
//Turn left
turnLeft(400);
coast(200);
//Turn right
turnRight(400);
coast(200);
//This stops the loop
run = false;
}
}
//Define high-level H-bridge commands
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
int pinA2 = D1;
int pinA1 = D2;
//Motor B pins
int pinB2 = D3;
int pinB1 = D4;
//This lets you run the loop a single time for testing
boolean run = true;
void setup() {
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop() {
if (run) {
for (int i = 0; i <= 500; i++) {
delay(10);
}
//Go forward
forward(400);
coast(200);
//Go backward
backward(400);
coast(200);
//Turn left
turnLeft(400);
coast(200);
//Turn right
turnRight(400);
coast(200);
//This stops the loop
run = false;
}
}
//Define high-level H-bridge commands
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
เลือก Port ในตัวอย่างเป็น "COM12"

เลือก Board : NodeMCU 1.0 (ESP-12E Module)

Upload

ถ้ามีปัญหา Upload ไม่เข้า ขึ้น Error แสดงข้อความว่า ตามรูปภาพ
warning: espcomm_sync failed
error: espcomm_open failed
error: espcomm_upload_mem failed

ให้กดปุ่ม RST 1 ครั้ง และ กดปุ่ม FLASH บนบอร์ด ของ NodeMCU ค้างไว้ ในขณะที่ทำการอัพโหลดโปรแกรม

รอจนกระทั่ง Done uploading. 100%

ใส่ แบตเตอรี่ ขนาด AA จำนวน 4 ก้อน ไปที่ รางถ่าน และ ตรวจสอบขั้วของแบตเตอรี่ ใส่ถุกต้องหรือไม่

ถ้าทุกอย่างถูกต้อง ทดลอง ยกลงวางที่พื้นแล้ว ทดสอบ ปิดเปิด สวิทช์ไฟ Power ถ้าทุกอย่างถูกต้อง ปรกติ รถจะเคลื่อนที่ไปข้างหน้า-ถอยหลัง แล้ว เลี้ยวซ้าย แล้ว เลี้ยวขวา
(ให้ล้อลากสีขาวเป็นท้ายของหุ่นยนต์ , ถ้าต้องการทดสอบใหม่ ให้ ปิดเปิด สวิทช์ไฟใหม่)
ถ้าหุ่นยนต์ เคลื่อนที่ปรกติ แสดงว่า หุ่นยนต์ของเราพร้อมทำงานแล้ว
การทำงานของ หุ่นยนต์เดินตามเส้น ESP8266

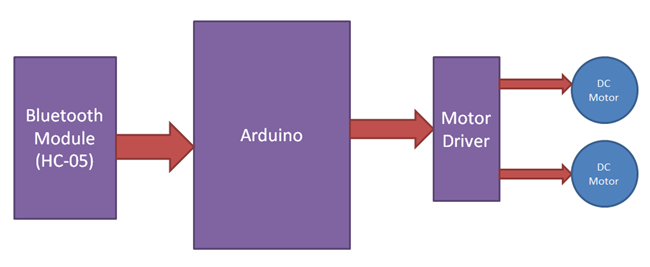
 หุ่นยนต์และมนุษย์มีหลักการทำงานที่เหมือนกัน คือ หน่วยรับข้อมูลเข้า (Input Unit) หน่วยประมวลผล (Process Unit) และหน่วยแสดงผล (Output Unit) ดังนั้นการที่หุ่นยนต์จะเคลื่อนที่ไปให้ตรงเป้าหมาย หุ่นยนต์จะต้องมีอุปกรณ์ที่จะตรวจสอบตำแหน่งและส่งข้อมูลที่ได้ไปยังหน่วยประมวลผล เพื่อให้มอเตอร์ทำการแสดงผลโดยการไปยังเป้าหมายต่อไป อุปกรณ์พื้นฐานที่ใช้ในการตรวจสอบตำแหน่งนั้น คือ โมดูลเซ็นเซอร์แสงสำหรับตรวจจับวัตถุกีดขวาง เซ็นเซอร์ตรวจสอบการสะท้อนแสงกลับมา ได้หรือไม่ แล้วส่งสัญญาณไปยัง ESP8266 แล้ว ESP8266 จึงไปสั่งให้มอเตอร์ทำงาน โดย Motor Driver Module HG7881 ให้เป็นไปตามการส่งค่ามาของเซ็นเซอร์
หุ่นยนต์และมนุษย์มีหลักการทำงานที่เหมือนกัน คือ หน่วยรับข้อมูลเข้า (Input Unit) หน่วยประมวลผล (Process Unit) และหน่วยแสดงผล (Output Unit) ดังนั้นการที่หุ่นยนต์จะเคลื่อนที่ไปให้ตรงเป้าหมาย หุ่นยนต์จะต้องมีอุปกรณ์ที่จะตรวจสอบตำแหน่งและส่งข้อมูลที่ได้ไปยังหน่วยประมวลผล เพื่อให้มอเตอร์ทำการแสดงผลโดยการไปยังเป้าหมายต่อไป อุปกรณ์พื้นฐานที่ใช้ในการตรวจสอบตำแหน่งนั้น คือ โมดูลเซ็นเซอร์แสงสำหรับตรวจจับวัตถุกีดขวาง เซ็นเซอร์ตรวจสอบการสะท้อนแสงกลับมา ได้หรือไม่ แล้วส่งสัญญาณไปยัง ESP8266 แล้ว ESP8266 จึงไปสั่งให้มอเตอร์ทำงาน โดย Motor Driver Module HG7881 ให้เป็นไปตามการส่งค่ามาของเซ็นเซอร์
เซ็นเซอร์แบบนี้จะมีช่วงในการทำงาน หรือ ระยะในการตรวจจับจะได้ใกล้กว่าแบบ Opposed mode ซึ่งในสภาวะการทำงานปกติ พื้นเเป็นสีขาว ตัวรับ Receiver จะสามารถรับสัญญาณแสงจากตัวส่ง Emitter ได้ตลอดเวลา เนื่องจากลำแสง สะท้อนกลับมาได้ จะแสดงค่า เป็น 0

และ เมื่อพื้นเป็นสีดำ แสงสะท้อนกลับมาไม่ได้ จึงทำให้ตัวรับ Receiver ไม่สามารถรับลำแสงที่จะสะท้อนกลับมาได้ จะแสดงค่า เป็น 1
โปรเจค หุ่นยนต์เดินตามเส้น ESP8266 NodeMCU V2 นี้ เราจะใช้ 2 เซ็นเซอร์อินฟราเรด คือด้านซ้ายและด้านขวา โดย เมื่อเซ็นเซอร์ ทั้งด้านซ้ายและด้านขวา ตรวจสอบแล้วเป็นพื้นสีขาว ลำแสง สามารถสะท้อนกลับมาได้ทั้งคู่ ( 0 , 0 ) ให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า
หากเซ็นเซอร์ซ้ายมาพบพื้นสีดำ และ เซ็นเซอร์ขวาพบพื้นสีขาว ( 1 , 0 ) ให้หุ่นยนต์เลี้ยวไปทางด้านซ้าย
หากเซ็นเซอร์ขวามาพบพื้นสีดำ และ เซ็นเซอร์ซ้ายพบพื้นสีขาว ( 0 , 1 ) ให้หุ่นยนต์เลี้ยวไปทางด้านขวา



หุ่นยนต์และมนุษย์มีหลักการทำงานที่เหมือนกัน คือ หน่วยรับข้อมูลเข้า (Input Unit) หน่วยประมวลผล (Process Unit) และหน่วยแสดงผล (Output Unit) ดังนั้นการที่หุ่นยนต์จะเคลื่อนที่ไปให้ตรงเป้าหมาย หุ่นยนต์จะต้องมีอุปกรณ์ที่จะตรวจสอบตำแหน่งและส่งข้อมูลที่ได้ไปยังหน่วยประมวลผล เพื่อให้มอเตอร์ทำการแสดงผลโดยการไปยังเป้าหมายต่อไป อุปกรณ์พื้นฐานที่ใช้ในการตรวจสอบตำแหน่งนั้น คือ โมดูลเซ็นเซอร์แสงสำหรับตรวจจับวัตถุกีดขวาง เซ็นเซอร์ตรวจสอบการสะท้อนแสงกลับมา ได้หรือไม่ แล้วส่งสัญญาณไปยัง ESP8266 แล้ว ESP8266 จึงไปสั่งให้มอเตอร์ทำงาน โดย Motor Driver Module HG7881 ให้เป็นไปตามการส่งค่ามาของเซ็นเซอร์
เซ็นเซอร์แบบนี้จะมีช่วงในการทำงาน หรือ ระยะในการตรวจจับจะได้ใกล้กว่าแบบ Opposed mode ซึ่งในสภาวะการทำงานปกติ พื้นเเป็นสีขาว ตัวรับ Receiver จะสามารถรับสัญญาณแสงจากตัวส่ง Emitter ได้ตลอดเวลา เนื่องจากลำแสง สะท้อนกลับมาได้ จะแสดงค่า เป็น 0

และ เมื่อพื้นเป็นสีดำ แสงสะท้อนกลับมาไม่ได้ จึงทำให้ตัวรับ Receiver ไม่สามารถรับลำแสงที่จะสะท้อนกลับมาได้ จะแสดงค่า เป็น 1
โปรเจค หุ่นยนต์เดินตามเส้น ESP8266 NodeMCU V2 นี้ เราจะใช้ 2 เซ็นเซอร์อินฟราเรด คือด้านซ้ายและด้านขวา โดย เมื่อเซ็นเซอร์ ทั้งด้านซ้ายและด้านขวา ตรวจสอบแล้วเป็นพื้นสีขาว ลำแสง สามารถสะท้อนกลับมาได้ทั้งคู่ ( 0 , 0 ) ให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า

หากเซ็นเซอร์ซ้ายมาพบพื้นสีดำ และ เซ็นเซอร์ขวาพบพื้นสีขาว ( 1 , 0 ) ให้หุ่นยนต์เลี้ยวไปทางด้านซ้าย

หากเซ็นเซอร์ขวามาพบพื้นสีดำ และ เซ็นเซอร์ซ้ายพบพื้นสีขาว ( 0 , 1 ) ให้หุ่นยนต์เลี้ยวไปทางด้านขวา


3. ประกอบ เซ็นเซอร์ ทั้ง 2 ตัว เข้ากับหุ่นยนต์





4. ทดสอบการทำงานของ เซ็นเซอร์ ทั้ง 2 ตัว


ถ้าได้ แสดงว่า เซ็นเซอร์ ทั้ง 2 ตัว นั้นพร้อมทำงานแล้ว
ภาพรวม หุ่นยนต์เดินตามเส้น NodeMCU V2

เปิดโปรแกรม Arduino (IDE) และ Upload โค้ด หุ่นยนต์เดินตามเส้น ไปยัง บอร์ด NodeMCU V2
/*
* By : RobotSiam.com
*/
// Motor A pins
int pinA2 = D1;
int pinA1 = D2;
//Motor B pins
int pinB2 = D3;
int pinB1 = D4;
int sensor_L , sensor_R ; //optical sensor values
void setup()
{
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop()
{
sensor_L = digitalRead (D5) ;
sensor_R = digitalRead (D6) ;
if ((sensor_L == 0) && (sensor_R == 0) )
forward(1);
else if ((sensor_L == 1) && (sensor_R == 0) )
turnLeft(10);
else if ((sensor_L == 0) && (sensor_R == 1) )
turnRight(10);
else if ((sensor_L == 1) && (sensor_R == 1) )
disableMotors();
else
forward(1);
}
//Define high-level H-bridge commands
void enableMotors()
{
motorAOn();
motorBOn();
}
void disableMotors()
{
motorAOff();
motorBOff();
}
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//enable motors
void motorAOn()
{
//digitalWrite(enableA, HIGH);
}
void motorBOn()
{
//digitalWrite(enableB, HIGH);
}
//disable motors
void motorAOff()
{
//digitalWrite(enableB, LOW);
}
void motorBOff()
{
//digitalWrite(enableA, LOW);
}
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
ภาพรวม หุ่นยนต์เดินตามเส้น NodeMCU V2

เปิดโปรแกรม Arduino (IDE) และ Upload โค้ด หุ่นยนต์เดินตามเส้น ไปยัง บอร์ด NodeMCU V2
/*
* By : RobotSiam.com
*/
// Motor A pins
int pinA2 = D1;
int pinA1 = D2;
//Motor B pins
int pinB2 = D3;
int pinB1 = D4;
int sensor_L , sensor_R ; //optical sensor values
void setup()
{
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop()
{
sensor_L = digitalRead (D5) ;
sensor_R = digitalRead (D6) ;
if ((sensor_L == 0) && (sensor_R == 0) )
forward(1);
else if ((sensor_L == 1) && (sensor_R == 0) )
turnLeft(10);
else if ((sensor_L == 0) && (sensor_R == 1) )
turnRight(10);
else if ((sensor_L == 1) && (sensor_R == 1) )
disableMotors();
else
forward(1);
}
//Define high-level H-bridge commands
void enableMotors()
{
motorAOn();
motorBOn();
}
void disableMotors()
{
motorAOff();
motorBOff();
}
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//enable motors
void motorAOn()
{
//digitalWrite(enableA, HIGH);
}
void motorBOn()
{
//digitalWrite(enableB, HIGH);
}
//disable motors
void motorAOff()
{
//digitalWrite(enableB, LOW);
}
void motorBOff()
{
//digitalWrite(enableA, LOW);
}
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}